

数据中心科士达UPS供电系统中并机技术与可靠性的关系分析

科士达UPS电源作为数据中心供电系统的关键设备,为IT和动力负载提供持续、稳定、可靠的电力保障,已成为影响数据中心供配电系统可靠性的最核心要素。随着IT技术的不断发展、信息化需求不断增加、物联网等新技术的出现,数据出现爆炸性的增长迫使数据中心迅速提升自身规模,从而带来了数据中心科士达UPS供电容量的大幅度提升。以目前电力电子技术的发展状况看,科士达UPS单机容量已不能满足数据中心供电系统对大容量的需求,为解决这一容量瓶颈问题,业界普遍采用了科士达UPS并联的运行方式。但是科士达UPS的并联运行存在并机同步、并机均流以及并机响应速度等多方面问题,如处理不好就会带来非常严重的后果,因此对并机系统可靠性的研究已成为数据中心供配电系统得重要问题。
2 科士达UPS并机系统运行方式分析
图1是一个典型4台科士达UPS组成的并机系统,下面对其运行方式进行描述。
图中UPS1~4在配电上共用输入和输出交流母线,组成一个在物理结构上的并联系统,通过并机控制软件和并机连接硬件交互数据将原本独立的科士达UPS主机在逻辑上组成一个有机体。实现并机系统再理想状态下各科士达UPS单机输出同步,输出电压、输出电流和输出频率一致,不存在超前、滞后现象;各单机之间不存在“环流”问题;并机系统中正常工作时,各科士达UPS均分负载,不会出现系统中某台负载率过高出现转旁路的情况,当负载发生变化时,每台UPS可以实时动态调整自身的输出功率;在并机系统中某一台出现故障后会主动退出并机系统并且不会影响整个并机系统的正常运行。因此,可靠的并机控制软件和并机连接硬件是并机系统可靠运行的核心。
3 UPS不同并机方式可靠性分析
下面介绍业界主流UPS厂家的并机技术,并对其并机控制软件和并机连接硬件的可靠性进行分析。
(1)UPS并机控制软件根据实现方式分为主从控制方式和对等控制方式
①主从控制方式
主从控制方式根据主机产生方式分为传统型主从控制方式和改进型主从控制方式。
·传统型主从控制方式
主从控制方式即在UPS并机系统中选出一台UPS作为控制主机,系统中剩余的UPS作为从机。
主机通过相应子功能模块完成电流、电压、频率的同步并向从机发布同步命令,实现系统的同步和负载的均分,确保系统的稳定运行。
在负载发生变动的时候主机会进行计算对各种参数进行重新计算和调节后重新发出各种指令给从机完成负载的重新分配和同步控制。
传统的控制算法在控制主机的选择上,采用按着预先设定好的方式,一旦控制主机失效,系统将按着预先约定的顺序将主机转移到备用主机上。
·改进型主从控制方式
在传统型主从式控制中,一旦备用主机没有按约定的顺序启动,当负载发生变化时,系统中各台UPS无法实现各种参数的重新分配即无法做到同步。导致某台UPS过载转旁路随后整个系统转为旁路工作,此时系统将处于不可靠状态。
改进型主从控制算法在主机的选择方式上不在仅依靠一台备用主机实现系统的备份控制,可以根据实际需要采用特定控制机制随机选举产生一个新的主机,系统中的任何一台主机都有可能成为新的控制主机,改进型主从控制算法相对于传统型控制算法在主机的选择机制上进行了改进,但由于这种方式系统内每台UPS都有可能被选举成为新的控制主机,因此每台UPS上必须拥有主机控制的相关算法和实时对主机控制状态进行监控,因此对控制器的运算速度、实时响应能力要求比较高。
从以上对传统型主从控制方式和改进型主从控制方式的分析可知,主从控制方式主机生成程序的可靠性对系统的稳定运行起着决定性作用。主从控制方式控制软件的任一子功能模块出现问题都会导致系统故障。在逻辑上各子功能模块是串联关系。为更直观表达和简化计算,假设并机控制软件内各种子功能是在统计上是相互独立的,此时可靠度数学模型为:(1)
其中RS(t)为并机控制软件系统可靠度,m为并机控制软件子功能模块数量(注:子功能模块含主机产生、负载均分、动态响应等功能模块),Rj(t)为并机控制软件子功能模块可靠度。
②对等控制方式
对等控制方式又称为“下垂式”控制算法,科士达UPS业内称之为“热同步”并机技术(后文将以热同步并机技术代称对等控制方式)。热同步并机技术仅需关注科士达UPS单机逆变器输出端电压变化量ΔU和电流变化量ΔI,以及ΔU×ΔI正负,即可通过自适应控制算法完成输出的同步、工作状态的判断;实现并机系统内UPS主机输出功率的调节、动态负载的均衡响应。
例如,对状态的判断可通过下面的方式:
UPS输出电流ΔI>0,输出电压ΔU<0,ΔU×ΔI<0即代表负载增加;
UPS输出电流ΔI<0,输出电压ΔU>0,ΔU×ΔI<0即代表负载减小;
UPS输出电流ΔU,输出电压ΔI同方向变化,ΔU×ΔI>0,即代表处于故障状态,将自动从输出母线中脱机退出,系统中剩余正常工作的UPS将均分此台UPS的功率。
使用热同步并机技术并机UPS主机之间无需数据交互通讯即可完成并网输出。因其不涉及UPS主机间的协调控制问题,无相应的并机控制软件,因此其可靠度等于“1”即(2)
其中RS(t)为并机控制软件系统可靠度。
(2)并机连接硬件
一套并机连接硬件包括并机控制线、控制接口及接口板等,实现方式上分为有线并机方式和无并机线并机两种方式。
①有线并机方式根据不同的拓扑结构分为单链形连接和环形连接两种方式,以图1为例对两种方式进行说明
·单链形连接
单链形是通过一组并机连接硬件将两台或多台UPS连接起来组成链状拓扑结构,当图1采用该方式时其拓扑结构如图2所示,这种方式各台主机之间类似串联工作方式,当其中一个硬件出现问题是将会导致部分从机失去通信。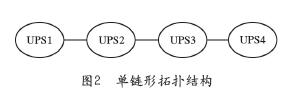
假设系统中有N台UPS并联,各连接硬件之间在统计上是相互独立的,不考虑UPS主机,仅考虑并机控制线的可靠度,此时可靠度数学模型为: (3)
(3)
其中Rh(t)为并机连接硬件的系统可靠度,N为系统内并联UPS的数量、N-1为并机控制线的数量,Rι(t)为每条并机控制线的可靠度。
·环形连接
各台UPS通过并机连接硬件首尾相连即组成环形连接,当图1采用该连接方式时其拓扑结构如图3所示,当任一套并机连接硬件出现故障时,控制信息还可以从剩余路径到达目的从机。只有当两套及以上并机连接硬件出现问题时,才会使部分从机失去通信。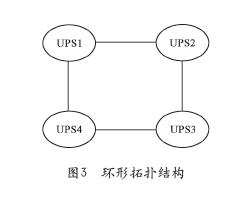
假设系统中有N台科士达UPS并联,各连接硬件之间在统计上是相互独立的,不考虑科士达UPS主机,仅考虑并机控制线的可靠度,此时可靠度数据模型为: (4)
(4)
其中Rh(t)为并机连接硬件的系统可靠度,N同时表示系统内并联UPS数量和并机控制线的数量,Rι(t)为每条并机控制线的可靠度。
有线并机除了传统通信线缆之外,为了降低电磁干扰、提高可靠性有的厂家还使用了光纤。
②无并机线并机根据实现方式分为无线并机方式和热同步并机两种方式
·无线并机方式
无线并机方式如图4所示。在并机系统中任意选取一台UPS作为主机,其余科士达UPS作为从机,主机和从机上均装有无线收发装置,在数据中心中电磁环境较为复杂,很容易受到干扰,在考虑可靠性的前提下该并机方式很少被采用,本文不再对其进行建模分析。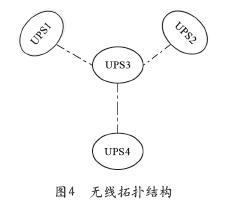
·热同步并机方式
热同步并机方式因并机系统中各科士达UPS主机之间无信息需要传递,无控制连接硬件。此时可靠度为 (5)
(5)
其中Rh(t)为并机连接硬件系统的可靠度。
(3)系统可靠性分析
依据参考文献1《数据中心科士达UPS供电系统中并机台数与可靠性的关系分析》,科士达UPS并机数量与并机控制软件、并机连接硬件之间为逻辑关系如图5所示。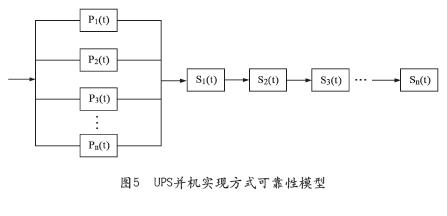
图中:Pi为科士达UPS并机系统内并联关系的相关子系统(例如:并联UPS数量);
Si为科士达UPS并机系统内串联关系的相关子系统(例如:并机连接硬件、并机控制软件)。
另外从该文献中可知“N+1”(N为非冗余主机数量,1为冗余主机数量)系统并机数量与可靠性关系数学模型如下式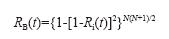 (6)
(6)
式中RB(t)为“N+1”系统中与科士达UPS并机数量有关的可靠度、Ri(t)为单机的可靠度、N为并机系统中非冗余主机数量。
因此,UPS并联系统可靠性可用下式表示: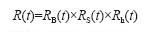 (7)
(7)
下面以“N+1”并机系统为例进行分析:
①当系统为“N+1”并机系统、采用主从控制方式,使用单链形连接时,结合式(1)、(3)、(6)和(7),并机系统的可靠度数学模型可表示为 (8)
(8)
式中R(t)为并机系统可靠度。
②当系统为“N+1”并机系统、采用主从控制方式,使用环形连接时,结合式(1)、(4)、(6)和(7),并机系统的可靠度数学模型可表示为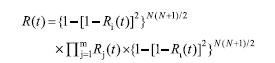 (9)
(9)
③当系统为“N+1”并机系统、使用热同步并机方式时,结合式(2)、(5)、(6)和(7),并机系统的可靠度数学模型可表示为 (10)
(10)
此时系统可靠度与主机仅考虑并联数量的可靠度相等。
为更加直观的说明“N+1”系统可靠性与并机控制软件和连接硬件可靠性的关系,将式(8)、(9)和(10)所对应的曲线绘制在同一坐标系中,如图6所示。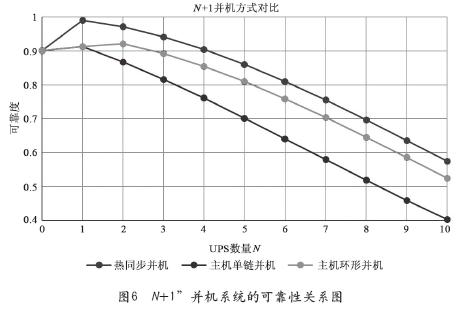
图中纵坐标是系统可靠度(假设单机可靠度Ri(t)为0.9,并机连接硬件可靠度Rh(t)为0.97,并机控制软件系统可靠度RS(t)为0.95),横坐标是“N+1”UPS系统中“N”的数量。
“热同步并机”曲线是根据式(10)绘制,即使用热同步并机方式,不需考虑连接并机连接软件和硬件的系统可靠性的影响,仅考虑并机UPS数量的可靠度曲线。从图中可看出在“1+1”并机时系统可靠度最高,随着并机数量的增加而逐渐降低。
“主机单链并机”曲线是根据式(8)绘制,即并机硬件采用单链形连接的方式,考虑并机UPS数量以及并机连接软件影响的可靠度曲线。从图中可以看出由于并机控制软件和并机单链连接方式的加入使“主机单链并机”可靠度曲线在数值上始终小于“UPS主机”可靠度曲线。
“主机环形并机”曲线是根据式(9)绘制,即并机硬件采用环形连接的方式,考虑并机科士达UPS数量以及并机连接软件影响的可靠度曲线;从图中可以看出“主机环形并机”可靠度曲线位于“主机单链并机”可靠性曲线和“UPS主机”可靠度曲线位置之间,可判断环型并机方式可靠性略大于单链形并机方式的可靠性。但仍不能避免由于并机控制软件和并机连接硬件加入对系统可靠性减低的影响。



 客服1
客服1